

EMUS BMS Konfiguration

Inhalt:
Das EMUS BMS mit LiFePo4 Akkus
Das EMUS BMS ist ein sehr unsiversell einsetzbares Batterie Management System, das über die CAN Schnittstelle mit vieschiedenen Komponenten wie z.B. das Ladegerät kommunizieren kann.
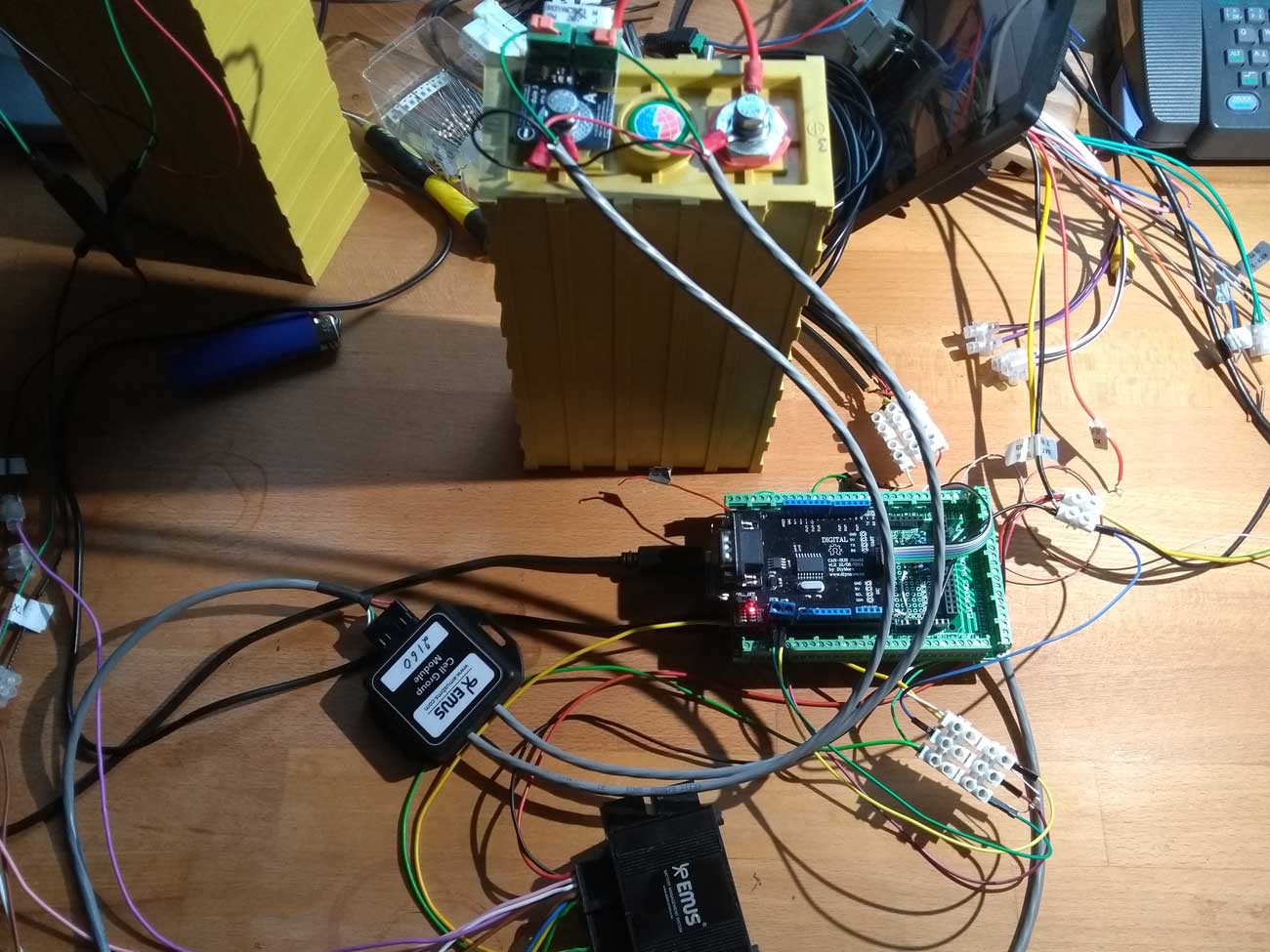
Hier das Testsetup: Arduino, EMUS BMS, Top/Bottom Isolatoren und ein Cell Module mit Winston Akku. Die Top Bottom Isolatoren kann ich sehr empfehlen. Die sind preiswert, konfigurationsfrei und recht robust. Nur keinesfalls falsch anschließen! Die EMUS CAN Module sind schwerer zu konfigurieren, mit ihnen können die Akkupacks aber überall (also weiter weg vom BMS) plaziert werden und auch aufgeteilt werden.
EMUS BMS Installation
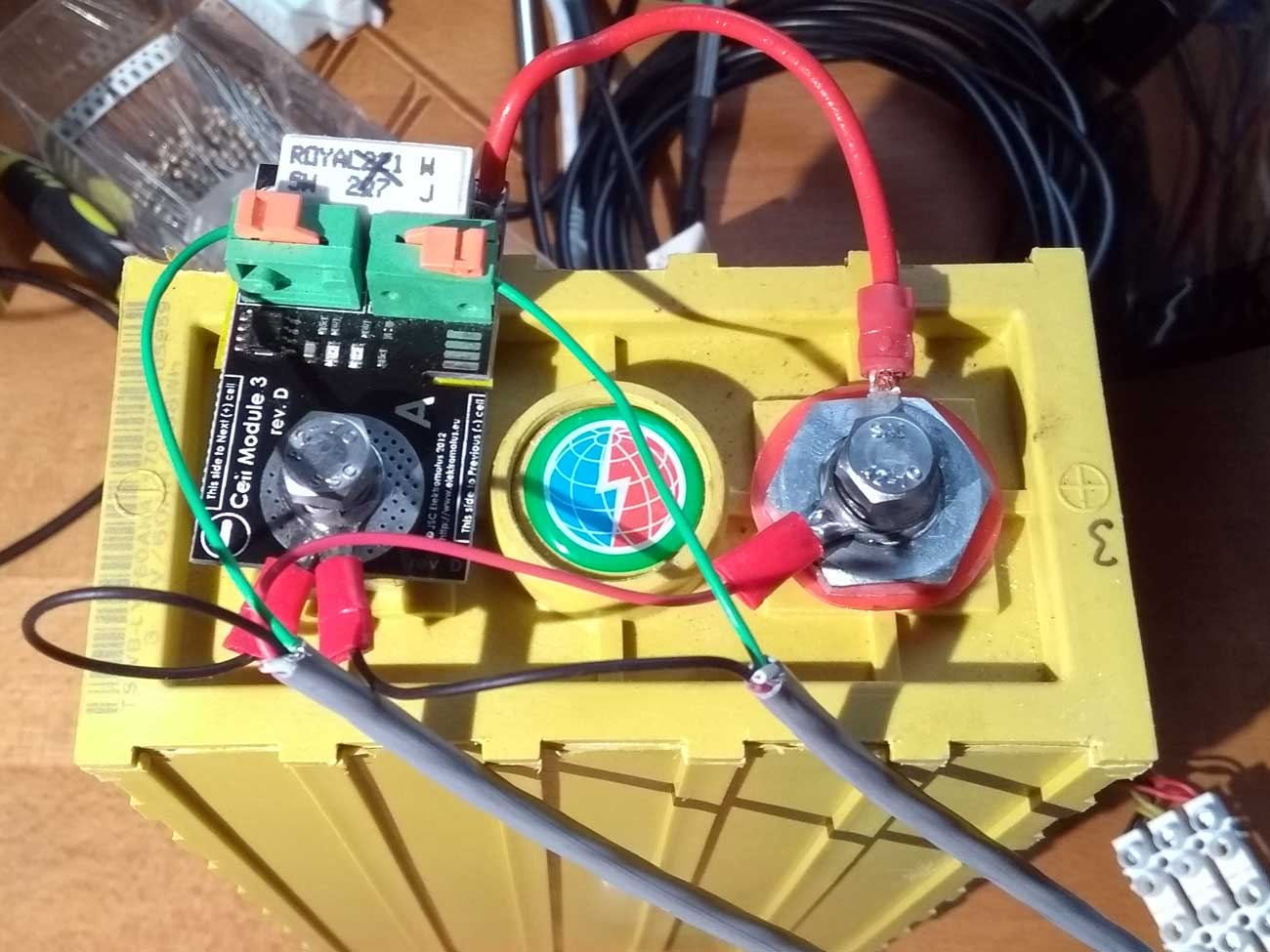
CAN Cell Group Module
Um die Funktion des BMS zu testen, reicht es, ein Akku mit den EMUS Top/Bottom Isolatoren zu verbinden. Alternativ (teurer) kann ein CAN Cell Group Module verwendet werden, das den Vorteil hat, das mehrere Akkublöcke verbunden werden können, und das Modul eine galvanische Trennung zu den Akkus hat. (Wer mal aus versehen, und das passiert im Eifer des Gefechts schneller, als man denkt, mit den Zell Modul Kabeln irgendwo gegen kommt, kann sich dann neue bestellen, sowohl die Isolatoren als auch die Module). Das CAN Cell Group Modul hat allerdings seine Tücken, wie ich schmerzhaft feststellen mußte. Es ist schwer zu konfigurieren und ich bin hatte einige Probleme mit dem nicht gut funktionierendem Steckverbinder des Moduls. So oder so empfiehlt es sich IMMER erst einmal einen Test mit einem Akku am Computer im Wohnzimmer zu machen, als tagelang einen Fehler in der Garage am Auto zu suchen…. glaubt mir….. !!
An das CAN Cell Group Modul können bis zu 16 Akkuzellen angeschlossen werden und an die Control Unit bis zu 32 CAN Cell Group Module.
Auf folgende Dinge muß geachtet werden:
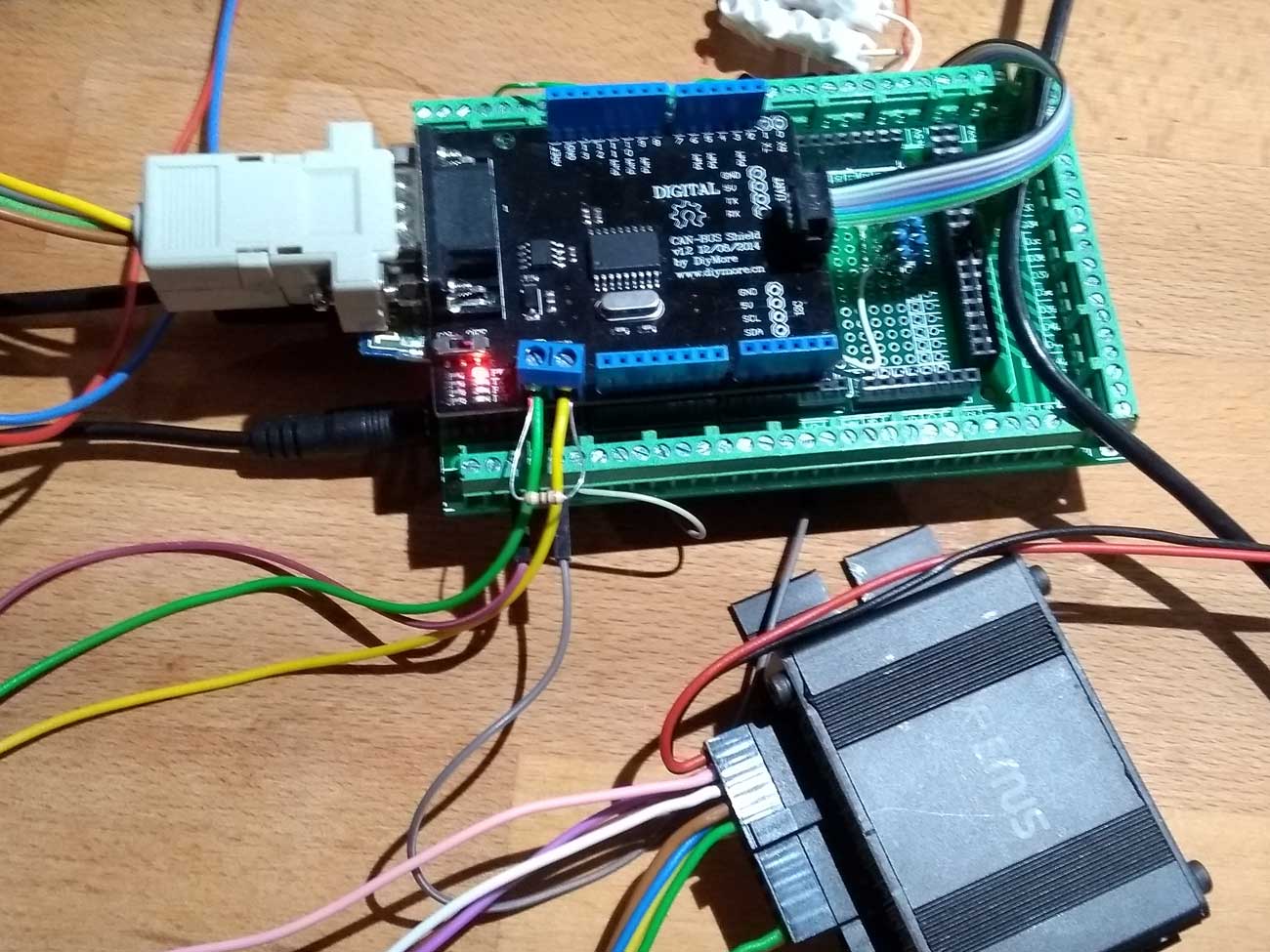
- GND vom Arduino und EMUS müssen verbunden werden, damit das CAN Signal eine gemeinsame Masse hat.
- CAN Devices sind in Reihe zu schalten, keinesfalls sternförmig. Dies führt unweigerlich zu Problemen.
- CAN Leitungen benötigen an beiden Enden einen Abschlußwiderstand, am Arduino ist ein 60 Ohm CAN Abschlusswiderstand zwischen CAN H und CAN L geschaltet und am anderen Ende der CAN Leitung ebenfalls.
- Wenn ein CAN Group Modul verwendet wird, muß dieses richtig konfiguriert werden. CAN Bus speed ist 250 kbps.
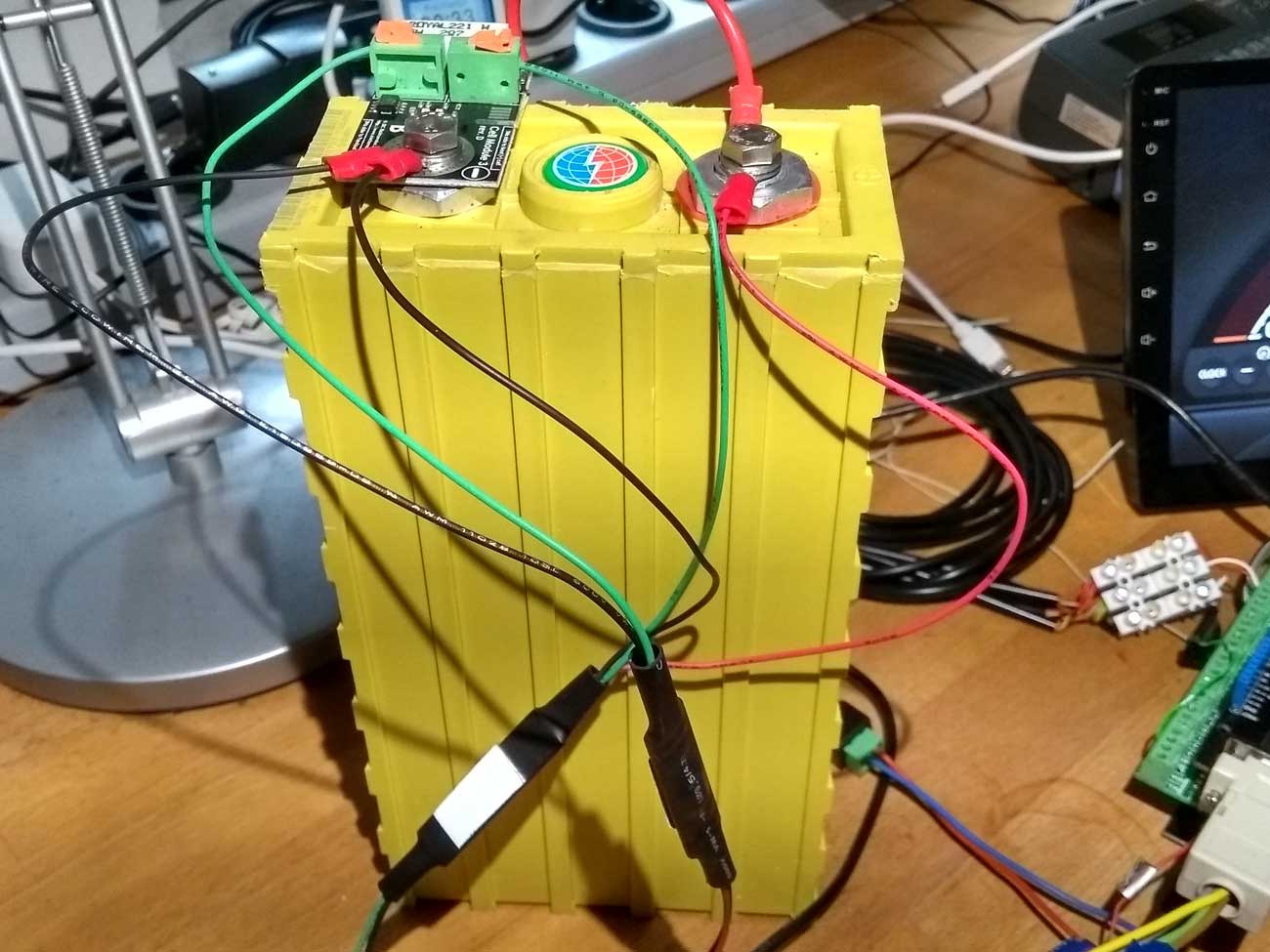
- Es muß mindestens ein Akku mit einem Cell Module angeschlossen werden.
Nach der Installation testen:
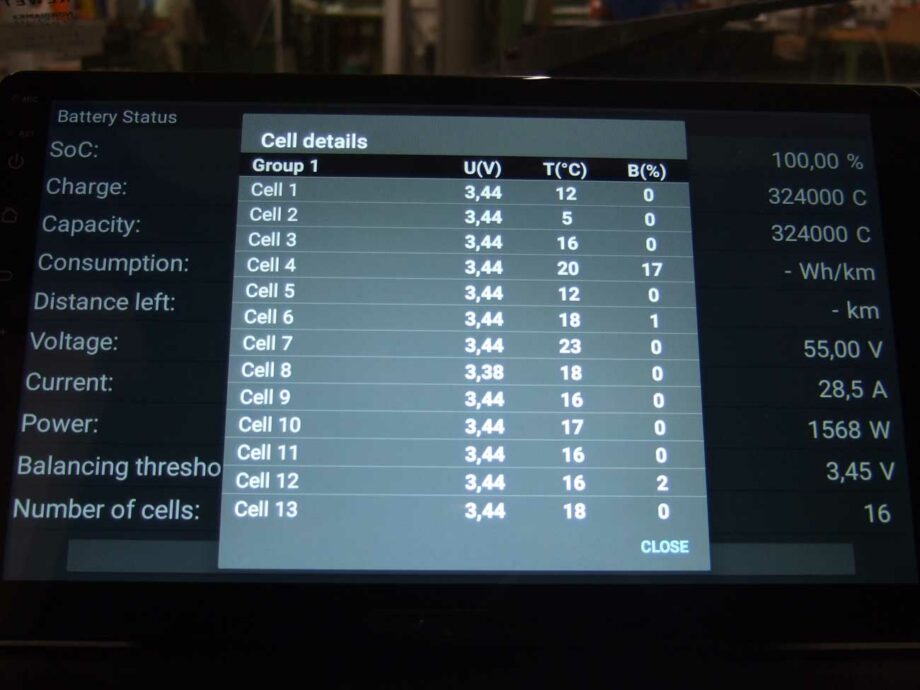
An jeder Akkuzelle die Spannung messen und mit der Anzeige in der Konfiguratiossoftware vergleichen. Ich hatte Zellmodule, die große Abweichungen von der tatsächlichen Spannung aufgewiesen haben. Akzeptabel sind Abweichungen < 0,02V. Diese unbedingt tauschen!
Firmware
Das BMS ist noch die „alte“ Version, inzwischen (Anfang 2021) gibt es eine neue Hardware. Die Firmwarekompatibilität der alten Hardwareversion ist gegeben bis:
- EMUS G1 Control Panel 2.4.14 (Windows Konfigurationssoftware)
- G1 Control Unit Firmware 2.0.21.4 (EmusBMS_m644_v2.0.21.4_Zivan_RE)
Verwendete Hardware und Software: Windows 10 mit Parallels Desktop 14 auf einem MAC, Arduino Mega 2560, Arduino IDE 1.8.9, EMUS BMS mit Software 2.4.14, G1 Control Unit Firmware 2.0.21.4, CAN Group Module, CAN Shield Seedstudio V1.2, Bluetooth Module HC-05 (38400 Baud dataspeed), Realdash in Version 1.5.9
Mein Zivan N3 läuft leider nicht mit der neuesten Firmware, ich benutze die Firmware EmusBMS_m644_v2.0.21.4_Zivan_RE
EMUS Windows Konfigurationssoftware
EMUS hat eine Windows Konfigurationsoftware, eine Überwachungsapp für Iphone oder Android Handy die über Bluetooth mit dem EMUS im Fahrzeug kommuniziert und ist wirklich umfangreich konfigurierbar.
Installation
Die Installation der Windows Konfigurationssoftware ist simpel:
EXE herunterladen und öffnen. Vorher muss noch ein FTDI Treiber für die USB Kommunikation installiert werden und die Übertragungsgeschwindigkeit auf 57.600 Bit im Windows Gerätemanager für den Treiber eingestellt werden.
Konfiguration
Die Konfiguration in der Windows Software ist zwar ganz gut dokumentiert, welche Werte aber sinnvoll sind, darüber habe ich wenig bis nichts gefunden. Deshalb möchte ich hier auf die wichtigsten Einstellungen eingehen.
Wichtig noch zu sagen: Die Einstellungen gelten für Winston LiFePo4 Zellen und können für andere Akkutypen abweichen.
Winston LiFePo4 Karakteristik
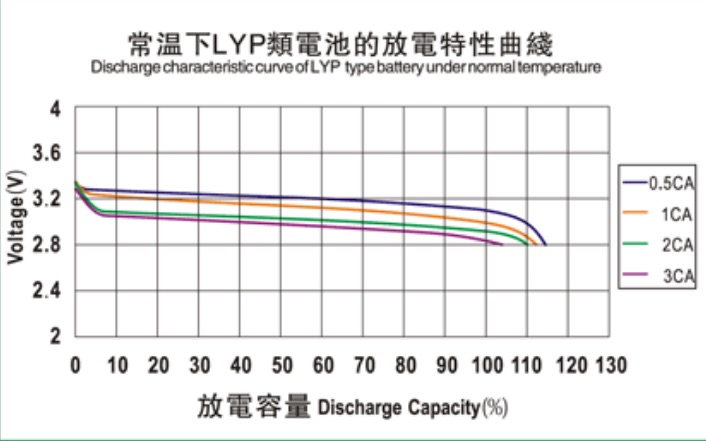
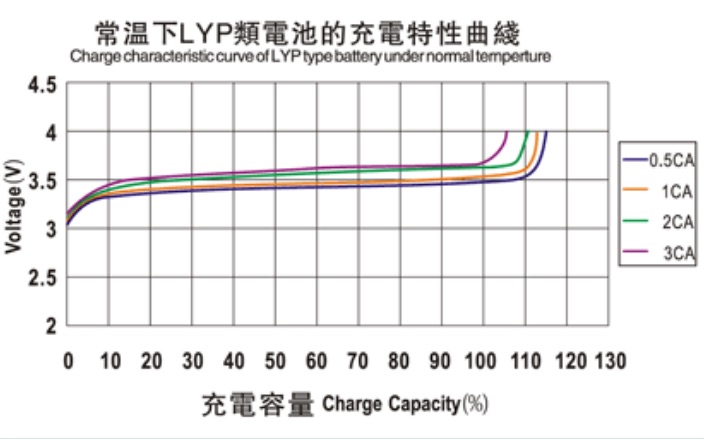
Schauen wir uns erst einmal die beiden wichtigsten Diagramme aus dem Datenblatt des Akkus an:
Lade Charakteristik: Bei 0.5C (also in meinem Fall ca. 50A Ladestrom) ist das Akku bei 3,5V voll geladen. (leider ist die Kurve sehr flach).
Entlade Charakteristik: Bei 85% Entladetiefe und 2C Entladestrom (also im Fahrbetrieb ca. 200A) ist die Akkuspannung noch 3,0V.
Zur Ermittlung des SOC lies diesen Beitrag: LiFePo4 Ladezustand im Elektroauto ermitteln
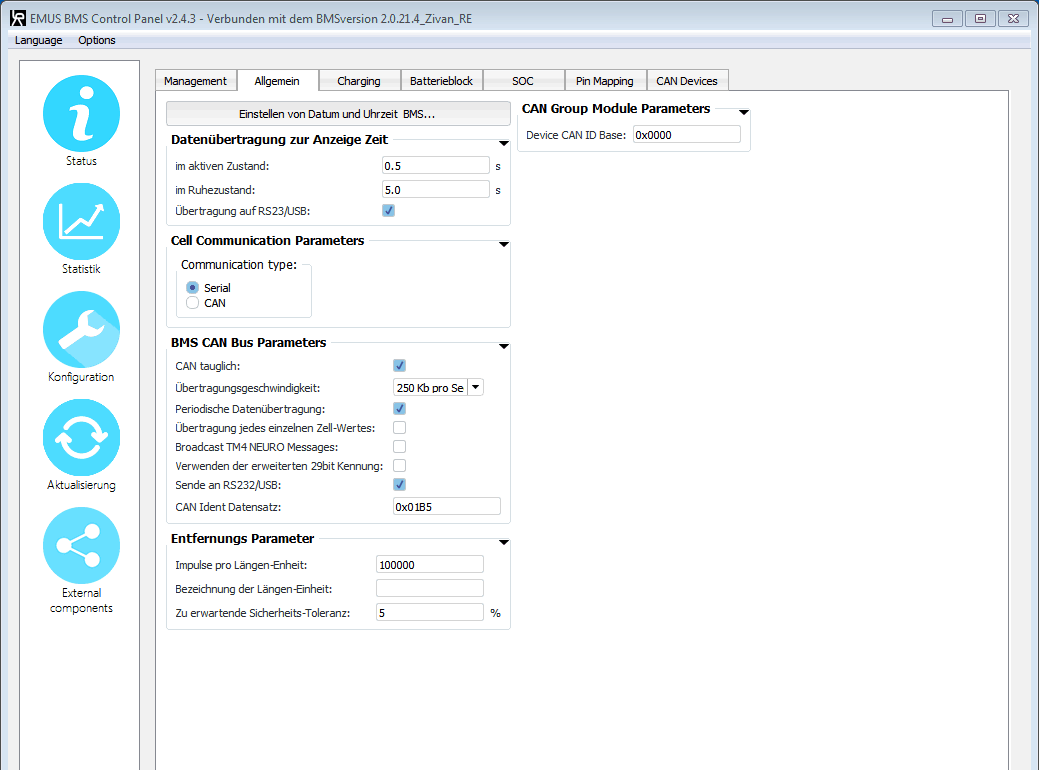
Allgemein Konfiguration
Cell Communication
Hier wird eingetragen, ob wir einen „G1 Top/Bottom Isolator“ als Zellkommunikations Adapter verwenden oder einen CAN Adapter, das „G1 CAN Cell Group Module“
BMS CAN Bus Parameter
Die Übertragungsgeschwindigkeit ist Standard 250 KbpS. Wenn noch andere CAN Bus Geräte, wie z.B. ein Sevcon GEN4 Motorcontroller am Bus angeschlossen sind, muss dieser auf die selbe Übertragungsgeschwindigkeit eingestellt werden!
Hier noch einmal der Hinweis, das unbedingt auf eine korrekte Terminierung geachtet werden muss, also am Anfang und am Ende des CAN Bus ein 120 Ohm Widerstand.
Die Geräte nicht sternförmig sondern in Reihe anschließen!
Entfernungs Parameter
Der Motor im Kewet z.B. hat einen Impulsgeber, der die Motorumdrehungszahl misst. Geteilt durch einen Wert x kann so die Geschwindigkeit vom BMS berechnet werden.
Wenn ein Sevcon Motorcontroller sein Werk tut, gibt es den Impulsgeber leider nicht mehr. Ich suche gerade nach einer Möglichkeit, dieses Problem zu lösen.
Batterieblock Konfiguration
Die Ladeschlussspannung: Bis zu diesem Wert wir das Akku geladen. Auch wenn die Ladeanzeige schon auf 100% ist (dieser Wert wird aus der in das Akku geladenen Energie berechnet), wird der Akku bis zur Ladeschlussspannung geladen. Ein falscher Wert kann hier den Akku schädigen.
Diese Spannung ist natürlich abhängig vom Ladestrom, wie auch in der Grafik oben zu sehen ist. Wenn wir 0.5CA Ladestrom annehmen, ist die Ladeschlussspannung etwa 3,5V! So habe ich es auch im EMUS eingestellt, das hat zur folge, das der Akku noch etwas über die eingestellte Kapazität des Akkus weitergelanden wird. Ich habe das durch ein bisschen rumprobieren für mich so ermittelt.
Cell Under-Voltage (minimale Zellspannung): Hier kann festgelegt werden, wann das EMUS eine Warnung geben soll, das ein Spannungsminimum gegeben ist. Das ist eine Einstellung, die etwas „tricky“ ist:
Die Spannung ist umso niedriger, je mehr Strom aktuell entnommen wird. Wenn wir also 120A entnehmen (1CA) ist der Akku bei 3,0V leer! Das BMS gibt dann eine Warnmeldung aus.
Leider ist es so, das die Zellspannungen mit der Ladeanzeige nicht unbedingt korelieren. Hier muß also etwas rumprobiert werden, um die richtigen Werte zu finden!
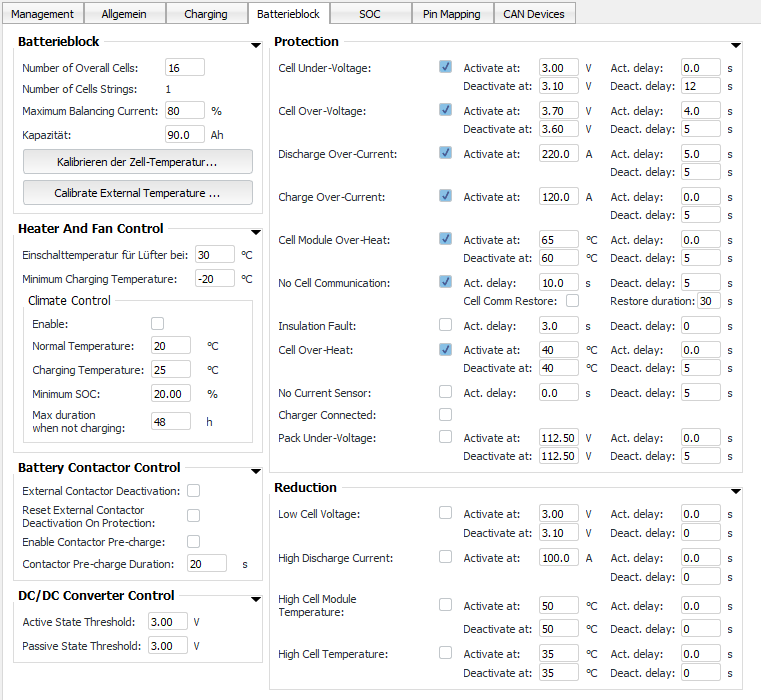
hier die wichtigsten Einstellungen:
Number of Overall Cells
Hier wird die Anzahl der in Reihe geschalteten Zellen angegeben. Wenn mehrere Zellen parallel geschaltet werden, gelten diese als eine Zelle
Maximum Balancing Current
Es gibt 2 Versionen der Balancer Module: 1.5A und 3.0A. Ich habe die 1.5A Version. Der Strom lässt sich einstellen, da dieser über den auf dem Balancer verbauten Lastwiderstand verbraten wird. Ich habe mal gemesen und bei 70% Balancingstrom werden die Widerstände 90°C heiß. Das finde ich noch OK. 100% sollten die Balancer aber auch aushalten.
Kapazität
Hier wird die Akkukapazität eingetragen, bei 2 Stück WB-LYP60AHA parallel also 120A minus der Tiefentladung und Überladung.
Das Bedeutet: Die Kapazität sollte nicht auf die nominelle Kapazität des Akkus gesetzt werden, sondern auf etwa 75%!
100% hätten zur Folge, das der Akku immer komplett geladen und entladen wird, was eine drastische Lebensdauerreduktion zur Folge hat, bzw. den Akku zerstören würde. Also, nie komplett entladen und nie bis zum Maximum aufladen! Wenn wir, um den Akku zu schonen (die Lebensdauer zu erhöhen) annehmen, das der Akku nur bis 15% entladen wird und nur bis 90% aufgeladen wird, sind das 25% weniger Kapazität, als die Nennleistung. Also in unserem Fall 90 Ah!
Wenn nun also diese 75% aus dem Akku im Fahrbetrieb entnommen wurden, zeigt die Ladezustandsanzeige des EMUS 0% an. Das hat nichts mit der tatsächlichen Spannung der Zellen zu tun. Wenn der Akku altert und an Kapazität verliert, sollte der Wert nachjustiert werden. Also immer auch auf die Akkuspannungen achten!
Heater and Fan control
Minimum charging temperature
Hier sollte -100 drinstehen, wenn du keine Akkuheizung hast. Ansonsten beleibt das Ladegerät bei „Preheating“ stehen, wenn die Zellen mal etwas zu kalt sind oder die Zellmodule ihre Kalibrierung verlieren, was auch gern passiert.
Protection
Die Einstellungen unter Protection machen nur denn Sinn, wenn auch hardwaremäßig ein Schutz integriert ist und das BMS mit Strom versorgt wird, also das 12V System läuft. Ich habe einen BMS Schaltausgang in den Züdschlüsselkreis integriert und zur Zeit als Schutz folgende Optionen angehakt:
Cell Under-Voltage: Wenn eine Akkuzelle des Batteriestrangs unter 3.0V fällt.
No Cell Communication: Wenn die Kommunikation des BMS mit dem Akkublock ausfällt.
Keinen Sinn macht:
Cell Module Over-Heat: Macht keinen Sinn, da der Temperatursensor auf dem Balancer Modul sitzt, und eigentlich nur die Temperatur des Balancing Widerstandes misst, was beim Laden sehr stören kann.
DC/DC Converter Control
Active State Threshold / Passive State Threshold: Der DC/DC Converter, also der Fahrakku/12V Akku Konverter, der die 12V Versorgungsspannung bereitstellt, ist auch im Leerlauf ein ernstzunehmender Energiefresser. Szenario: Ich lasse das Standlicht an, dann wird bei aktivem DC/DC Converter nicht nur die 12V Batterie leer gesaugt, sondern auch das Fahrakku. So habe ich einen zweiten Schaltausgang des BMS über ein Relais an den DC/DC Converter geschaltet, um im Fall, das die Zellspannung unter 3.0V fällt, dieser abgeschaltet wird. (Dieser Kreis ist unabhängig vom Zündschlüssel Kreis!)
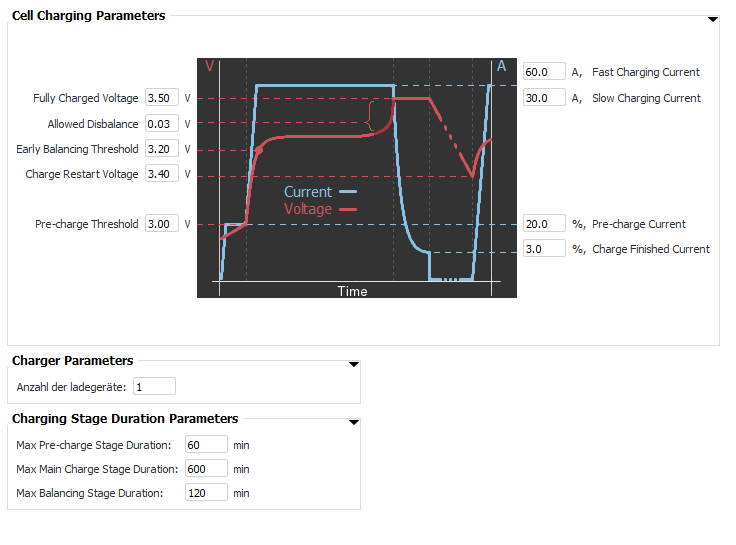
Charging
Auf diese Einstellungen ist besonderes Augenmerk zu legen!
Fully Charged Voltage Einstellung sollte bei LiFePo4 Zellen nicht über 3,5V liegen, anderenfalls findet eine Überladung statt, die die Zellen schädigt.
Wenn die angegebene Spannung erreicht ist, verringert das BMS den Ladestrom kontinuierlich, wobei versucht wird, die Spannung zu halten. Ist der hierbei fließende Strom kleiner
Charge Finished Current wird der Ladevorgang beendet. Charge Finished Current ist ein Prozentsatz von Fast Charge Current/Slow Charge Current.
Überschläglich sollte der Ladevorgang beendet werden, wenn 1% Strom der Akkukapazität erreicht ist (also bei einem 100Ah Akku 1A). Bei 50A Ladestrom sind 1A dann 2% ! 😉
Hierbei ist zu beachten, das EMUS den Strom bei erreichen von Fully Charged Voltage einer Zelle herunterregelt und dabei den entsprechenden Balancing Wiederstand einschaltet.
!! Das geht so lange, bis alle Zellen Fully Charged Voltage erreicht haben und der Ladestrom kleiner Charge Finished Current ist!! Hat also eine Zelle noch nicht die Fully Charged Voltage erreicht, kann das länger dauern!
Wenn
Max Balancing Stage Duration vorher erreicht ist, wird die Ladung abgebrochen und eine Fehlermeldung (z.B. Summer) ausgegeben.
Allowed Disbalance gibt an, um welchen Spannungswert die Zellen voneinander abweichen dürfen und ist der Hauptparameter für das Zellbalancing.
Eary Balancing Treshold ist der Spannungswert, ab dem das BMS anfängt zu balancieren. Hier kann ein recht niediger Wert eingesetzt werden um das Balancieren zu erleichtern. Wenn es auf schnelle Ladung ankommt, kann der Wert höher gesetzt werden.
Pre-charge Threshold ist die Spannung, unter der der Akku tiefentladen ist. Hier wird das BMS angewiesen, mit dem Wert Precharge Current zu laden um mit einem zu hohen Ladestrom den Akku nicht zu schädigen.
Fast Charge Current ist der maximale Ladestrom, den der Lader leifern kann (wenn der Wert höher angegeben ist, kann es zu Fehlern kommen.)
Slow Charge Current ist ein verminderter Ladestrom. EMUS hat einen Eingang, auf den ein Schalter gelegt werden kann, mit dem man die Ladeströme umschalten kann.
Einstellungen
Die Einstellung „Fully Charged Voltage“ ist wohl hier wiederum die Wichtigste! Im obrigen Bild ist zu sehen, das sie auf 3,50V eingestellt ist. Bei mir sind die Zellspannungen dann immer auseinandergelaufen und das BMS hat ewig gebraucht, zu balancieren. Der Grund: Mit 3,50V sind die Zellen schon in einem überladenen Bereich. Ich habe den Wert dann mal auf 3,45V eingestellt, und siehe da: Perfekt! Nur eine Zelle hat einen Ausreißer, diese hat aber bei einer Tiefentladung mal einen wegbekommen….
Charger Parameters
Charger Parameters Hier kann auch die Anzahl der verwendeten Ladegeräte, so man mehr als eines verwenden möchte, eingestellt werden.
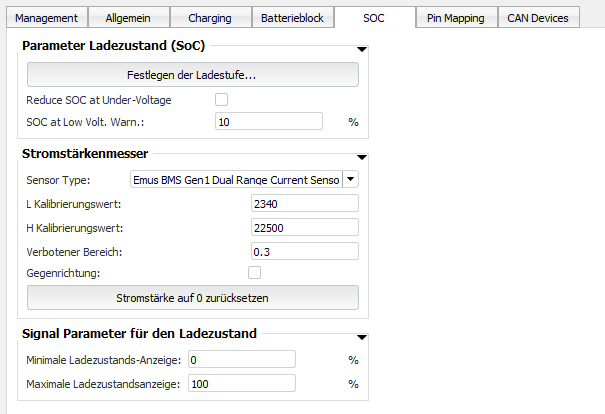
SOC
SOC (state of charge) ist so ein Thema… EMUS bekommt die Berechnung nicht sonderlich gut hin. Die SOC Berechnung wird durch einen Coloumb Zähler vorgenommen, das heißt, die in der Batterieblock Einstellung eingestellte Akkukapazität wird bei Stromentnahme heruntergezählt und wenn aller Strom (theoretisch) entnommen ist, sind wir bei 0%.
Leider nur theroretisch, denn der Akkublock altert schließlich auch und bei niedriger Temperaturen hat er auch weniger Kapazität.
Tiefentladung
Wenn der Akkublock tatsächlich einmal versehentlich sehr tief entladen wurde (unter 2,5V) funktionieren die Zell Module nicht mehr unsd das BMS kann den Akku nicht mehr laden!
Was hier nur noch hilft, ist den Block oder jede einzelne Zelle mit einem Netzgerät mit reglbaren Strom vorzuladen. 2A sind hier ein ganz guter Wert.
Beitrag wird fortgesetzt…..
Der Einbau des BMS ist im nächsten Beitrag dokumentiert: Kewet Umbau Akkus LiFePo4
Bei Fragen bitte die Kommentarfunktion nutzen!
Dies ist ein privater Blog. Brauchst du professionelle Hilfe zum GEN4, EMUS BMS, EV Umbau oder Programmierung? Dann bitte hier klicken!
Hallo
Wie hast du die Kommunikation zwischen dem Sevcon Controller und dem EMUS BMS sichergestellt?
Ich bin an einem ähnlichen Umbau dran und würde dies gerne so implementieren, dass das BMS das Hauptrelais über den Controller mit CAN Kommunikation fernsteuert. Sollte laut Manual ja funktionieren
Würde mich auf eine Antwort freuen
Hallo,
habe ich noch garnicht hergestellt, da der SEVCON bei mir noch nicht in Betrieb ist. Du kannst natürlich das Hauptrelais direkt über das BMS schalten, das würde ich dann der einfachheit halber direkt machen und nicht über CAN. Prinzipiell braucht es für eine CAN Kommunikation zwischen BMS und SEVCON eine CAN/CAN Open bridge. Ist bei mir in Planung aber im Moment nicht aktuell. Sowas gibt es als kommerzielles Produkt https://esd.eu/de/products/gateways-und-bridges oder du schaust mal, was das Netz hergibt. Ich denke, ich habe mal sowas auch als Arduino Projekt gesehen.
Hallo,
ich habe ein Problem mit einem Emus BMS. Vielleicht könntest du mir ja einen Tipp geben.
Ich habe mir vor kurzem einen Cityel gekauft und neue Batterien (16x GBS 60Ah) eingebaut. Da von den alten Batterien noch ein Emus BMS installiert war, habe ich das einfach weiter verwendet. Jetzt ist es allerdings so, dass die Zellen beim Laden sehr unterschiedlich voll werden. Das BMS bricht nach ein paar Stunden in der Hauptladestufe immer wieder ab und startet neu, da von wenigen Zellen die Spannung zu hoch ist. Zwar wird das dann später wieder ausbalanciert, aber ich bekomme im Endeffekt nur 50% Ladung der Batterien. Selbst bei 100% Balancierstrom ändert sich das kaum. Das Ladegerät hat keinen CAN Anschluss. Ich habe mich bei der Konfiguration an den Herstellerangaben der Batterien und an deinem Blog orientiert, sonst gibt es dazu ja so gut wie nichts.
Viele Grüße,
Tobias
Hi Tobias,
wenn neue LIFEPO4 beim Laden so auseinanderlaufen, ist mit den Zellen was nicht OK….
Ich kenne die GBS nicht, aber das sollte nicht sein. Ich tippe da auf einen Zelldefekt.
Die Winston muß man anfänglich mit 4.1V „vorformatieren“, als erste Ladung, vielleicht bringt das was. Vielleicht ist das bei den GBS auch so, ich würde da mal den Händler kontaktieren.
Gruß, Michael
Hallo könnten sie mir bei meiner Installation helfen? Hätte 36 Zellen und komme mit der Emus Anleitung nicht wirklich klar…
Mfg
Wo ist denn das Problem?
na hallo.. hatte es zwischenzeiltich hinbekommen bei mir war ein zellenmodul defeckt..
Hallo wie bekommt man die zell group module in das steuerteil.. es wird nicht gefundenn
Mfg
Hallo,
ich bin auf der Suche nach der alten EMUS Software BMS Control 1.8.x.x -2.0.x.x und der Firmware 1.8.16_BF13.
Kann mir hier jemand helfen ?
Gruß
Ronny
Hallo Michael.
zu oben, EMUS mit Sevcon:
Entfernungs Parameter
Der Motor im Kewet z.B. hat einen Impulsgeber, der die Motorumdrehungszahl misst. Geteilt durch einen Wert x kann so die Geschwindigkeit vom BMS berechnet werden.
Wenn ein Sevcon Motorcontroller sein Werk tut, gibt es den Impulsgeber leider nicht mehr. Ich suche gerade nach einer Möglichkeit, dieses Problem zu lösen.
Gibt es dazu schön eine Lösung?
Danke vorab.
Grüße
Andy
Hi Andy, du kannst doch weiterhin die impulse vom Kewet über Emus auswerten lassen, so mache ich es jedenfalls.